Robô-origami da NASA vai ajudar robôs convencionais a explorar o solo em Marte
Por Douglas Ciriaco | 29 de Março de 2017 às 08h01
A NASA tem o costume de apresentar novidades quando o assunto é a presença humana no espaço. Desta vez, a agência espacial dos Estados Unidos apresentou um pequeno robô inspirado em origamis que vai ajudar os rovers tradicionais na exploração do nosso vizinho Marte.
Chamado oficialmente de Pop-Up Flat Folding Explorer Robot (PUFFER ou, em tradução livre para o português, robô explorador dobrável plano que emerge), ele foi criado no Jet Propulsion Laboratory (JPL), sendo colocado à prova em locais distintos como o deserto de Mojave, nos EUA, e colinas repletas de neve na Antártida.
Feito para investigar dunas e encostas, ele pode deslizar por colinas com até 45° de inclinação. Além disso, este pequeno assistente poderá até mesmo fazer o “trabalho sujo” de investigar crateras no Planeta Vermelho, tudo isso mantendo a sua integridade e acessando locais que não poderiam ser verificados pelos robôs convencionais.
Como eles são dobráveis, é possível empilhar vários PUFFERs um sobre o outro, ampliando ainda mais as possibilidades de atuação. “Eles podem fazer pesquisas em conjunto com um rover, então é possível ampliar a quantidade de coisas que são feitas em um dia”, comenta de forma entusiasmada Jaakko Karras, diretor do projeto que criou o pequeno robô.
Como no papel
Um fato curioso envolvendo a concepção do PUFFER é que Karras começou o projeto há muitos anos, quando ainda era estudante de graduação. A sua ideia foi criar robôs baseados em formas naturais, com movimentos semelhantes aos de animais ou insetos, tudo isso utilizando papel e dobradura.
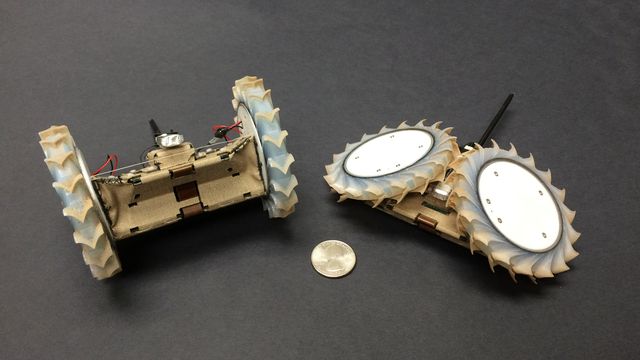
O passo seguinte foi, anos mais tarde, já com uma equipe sob a sua tutela, substituir o papel por placas de circuito impresso iguais às utilizadas em smartphones. Tal alteração permitiu dar os primeiros avanços.
“A placa de circuito inclui tanto a parte eletrônica quanto o corpo, o que permite a ela ser bem mais compacta”, comenta a engenheira mecânica do JPL Christine Fuller. “Não há qualquer acelerador de montagem ou outras partes para lidar. Tudo está integrado”, continua a cientista.
Ensinando o robô
O próximo passo do projeto PUFFER envolve torná-lo capaz de capturar as amostras em Marte. Para isso, a equipe de Karras deve equipar o robô-origami com mais ferramentas, o que deve torná-lo maior e mais robusto. Além disso, a ideia é fazer dele uma unidade autônoma — atualmente, ele é controlado remotamente via Bluetooth.
Fonte: NASA